如何评价2024华为杯研究生数学建模竞赛E题?
2024年中国研究生数学建模竞赛E题 高速公路应急车道紧急启用模型(多车道Cell Transmission+LWR+Kalman)

目前已经完成全部问题,总代码量千余行,可视化图表近10张,篇幅限制,放出部分内容以供参考、学习和交流。
问题分析
在高速公路交通管理中,如何在不增加道路硬件设施的情况下,最大限度地利用现有资源来缓解交通拥堵,是一个重要且现实的问题。题目主要关注以下几个关键点:
- 1 交通拥堵的原因与特点:
- 瓶颈现象:由于车流汇聚、匝道出入口、桥梁入口等特殊路段,导致道路通行能力下降,形成拥堵。
- 拥堵的蔓延性:一旦形成拥堵,容易向上下游蔓延,影响更大范围的交通流。
- 2 应急车道的利用:
- 应急车道的功能:原本用于紧急救援、消防、医疗等用途,平时不得占用。
- 临时借用应急车道的可行性:在特定情况下(如即将发生拥堵且无交通事故),允许车辆临时使用应急车道,以降低车流密度,预防拥堵。
- 3 现有管理方式的不足:
- 经验决策:目前主要依靠管理者的经验,通过视频监控来决定是否开放应急车道,缺乏理论依据。
- 效果评估困难:对缓解拥堵的效果难以量化评价。
- 4 建立数学模型的必要性:
- 预测拥堵发生的条件:通过模型识别特定路段即将发生拥堵的预兆。
- 评估应急车道的作用:量化临时借用应急车道对缓解拥堵的效果。
- 5 信息发布与车辆管理: 告示装置的作用:实时发布应急车道的使用状态,指导车辆进出应急车道。 应对突发事件:通过无人机巡查和高清摄像头,及时发现交通事故,指挥应急车道上的车辆撤回行车道,确保救援不受影响。
赛题分析
- 1 交通流模型的建立:
- 宏观模型:如LWR模型(Lighthill-Whitham-Richards),描述交通流的连续性方程。
- 微观模型:如元胞自动机模型、跟车模型,模拟个体车辆的行为。
- 中观模型:考虑车群的统计特性。
- 2 拥堵预测模型:
- 临界密度分析:确定道路的临界车流密度,当实际密度接近临界值时,拥堵可能发生。
- 实时监控数据的利用:利用上、中、下游的流量数据,预测未来时刻的交通状态。
- 3 应急车道开放策略: 决策模型:建立基于交通流参数的决策模型,确定何时开放或关闭应急车道。
- 优化模型:以最小化总行程时间或最大化道路通行能力为目标,优化应急车道的使用策略。
- 4 效果评估:
- 仿真模拟:使用交通仿真软件(如VISSIM、SUMO)模拟不同策略下的交通状况。
- 指标量化:通过平均速度、车流量、延误时间等指标评估策略效果。
- 5 安全性与应急处理:
- 车辆重新并入行车道的模型:模拟车辆从应急车道返回行车道的过程,确保安全性。
- 事故处理预案:建立在发生事故时的车辆调度和信息发布模型。
- 6 信息传播模型:
- 驾驶员响应行为:考虑驾驶员对告示装置的响应延迟和合规率。
- 通信延迟与可靠性:确保信息能够及时、准确地传达到每一位驾驶员。
- 7 多目标优化:
- 权衡通行效率与安全性:在提高通行能力的同时,确保应急救援不受影响。
- 社会效益与成本分析:考虑安装告示装置和监控设备的成本,与缓解拥堵带来的经济效益进行比较。
- 可能的模型和方法
- 数据驱动模型:利用历史交通数据和实时监测数据,训练机器学习模型预测拥堵发生的概率。
- 控制理论应用:将交通流视为动态系统,应用反馈控制策略调节车流密度。
- 博弈论模型:分析驾驶员在不同信息和规则下的行为选择,设计激励机制提高合规性。
- 排队论:对于匝道和瓶颈路段,建立排队模型分析车辆通过率和等待时间。
- 建立高速公路应急车道临时启用模型,需要综合运用交通工程、运筹学、控制理论和数据分析等多学科知识。模型应能够:
- 实时预测拥堵发生的可能性。
- 决策何时开放或关闭应急车道。
- 评估策略效果,量化对交通拥堵的缓解程度。
- 确保安全性,在突发事件时不影响应急救援。
- 通过科学的模型和方法,可以为高速公路管理部门提供理论依据,支持他们做出更合理的决策,提升交通管理水平。
逐题分析
问题1分析
- (1) 统计四个观测点的交通流参数随时间的变化规律
- 为了分析四个观测点的交通流参数随时间的变化规律,我们需要对视频数据进行处理,提取以下关键交通流参数:
- 车流量(q):单位时间内通过某观测点的车辆数,单位为车辆/小时。
- 车流密度(k):单位路段长度内的车辆数,单位为车辆/公里。
- 平均速度(v):车辆通过观测点的平均速度,单位为公里/小时。
- 数据处理步骤:
- 1 车辆检测与计数:利用计算机视觉技术,从视频中检测并计数通过各观测点的车辆。
- 2 车辆速度测量:通过帧间差分或跟踪算法,计算车辆的通过速度。
- 3 时间序列构建:将上述参数按照时间序列组织,形成连续的交通流参数数据集。
- 统计分析方法:
- 时间序列分析:对每个观测点的交通流参数进行时间序列分析,观察峰值、谷值和变化趋势。
- 相关性分析:计算不同观测点之间交通流参数的相关性,了解上下游交通的影响关系。
- 周期性分析:利用傅里叶变换或自相关函数,检测交通流参数的周期性特征,如早晚高峰。
- 期望发现的规律:
- 交通流参数在一天中的变化模式,如高峰期和非高峰期的特征。 上下游观测点之间的响应时间差异,了解交通流的传播速度。 特定条件下(如天气、节假日)的交通流特征变化。
(2) 建立交通流拥堵模型,提供实时预警及依据
- 模型选择:
- 为预测从第三点到第四点之间路段可能出现的持续拥堵状态,我们需要建立一个能够反映交通流动态特性的模型。考虑到模型的复杂性和实用性,我们选择 基于元胞自动机(Cellular Automata, CA)的交通流模型,并结合 机器学习方法 进行拥堵预测。
- 模型构建步骤:
- 1 元胞自动机交通流模型:
- 空间离散化:将路段划分为长度为 Δx 的元胞,每个元胞可为空或被一辆车占据。
- 时间离散化:以时间步长 Δt 更新系统状态。
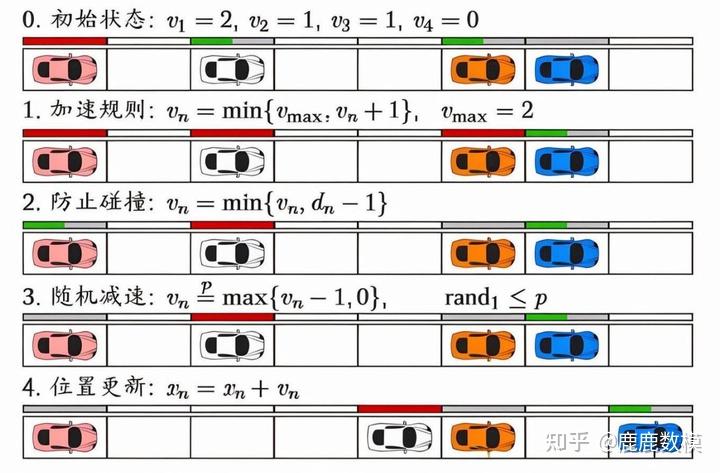
- 更新规则:根据车辆的加速、减速和换道行为定义更新规则,如Nagel-Schreckenberg模型。
- 2 参数校准:
- 利用观测点的实时数据,对模型参数(如最大速度、加速概率、减速概率)进行校准,使模型能够准确模拟实际交通流。
- 3 拥堵预测:
- 临界密度确定:通过模型模拟,找到导致拥堵发生的车流密度阈值。
- 拥堵传播分析:利用元胞自动机模型模拟拥堵的形成和传播过程,预测拥堵到达第三点至第四点之间的时间。
- 4 机器学习预测:
- 特征提取:从历史数据中提取特征,如车流量、车流密度、速度变化率等。
- 模型训练:使用支持向量机(SVM)、长短期记忆网络(LSTM)等机器学习模型,训练拥堵预测模型。
- 实时预测:输入实时数据,输出拥堵发生的概率和预计时间。
- 实时预警机制:
- 预警阈值设定:当模型预测拥堵发生的概率超过某个设定值(如80%)时,触发预警。
- 提前量确定:根据模型预测的拥堵到达时间,提前10分钟发布预警信息。
- 预警依据:模型输出的关键参数,如预计车流密度超过临界值、平均速度下降趋势等。
(3) 利用视频数据验证模型有效性
- 验证方法:
- 1 数据分割:
- 训练集:使用历史数据训练模型,包括正常和拥堵状态的数据。
- 测试集:保留部分数据(未用于训练)作为测试集,用于验证模型性能。
- 2 评价指标:
- 准确率(Accuracy):模型正确预测的次数占总预测次数的比例。
- 精确率(Precision):正确预测的拥堵次数占所有预测为拥堵的次数的比例。
- 召回率(Recall):正确预测的拥堵次数占实际发生拥堵次数的比例。
- F1-score:精确率和召回率的调和平均数,综合评价模型性能。
- 3 结果分析:
- 混淆矩阵:统计模型的预测结果,分析误判情况。
- ROC曲线:绘制受试者工作特征曲线,评估模型的判别能力。
- 4 模型改进:
- 根据验证结果,调整模型参数或更换模型,以提高预测精度。
问题2分析:
- 构建合理启用高速公路应急车道的模型
- 模型目标:
- 最大化通行能力:通过临时启用应急车道,提高路段的总通行能力。
- 保证安全性:确保应急车道的临时使用不会影响紧急救援。
- 最小化拥堵成本:减少车辆延误时间和燃油消耗。
- 模型构建:
- 1 多车道交通流模型:
- 改进的元胞自动机模型:在原有两行车道的基础上,增加应急车道作为第三车道,模拟车辆在三车道上的动态行为。 车道变换规则:定义车辆何时可以进入或退出应急车道,考虑车辆的合规性和安全性。
- 2 启用条件设定:
- 启用阈值:当车流量或车流密度超过某一临界值时,考虑启用应急车道。
- 安全约束:确保应急车道上没有紧急事件发生,且能够及时撤离车辆以应对突发状况。
- 3 优化模型:
- 目标函数:最小化总行程时间或车辆延误时间。
- 约束条件: 应急车道启用的时间和范围。 交通法规和安全要求。 信息发布和驾驶员响应延迟。
- 4 求解方法:
- 动态规划(Dynamic Programming):求解最优启用策略。
- 仿真优化结合:利用仿真模型评估不同策略的效果,结合优化算法寻找最优方案。
问题3分析:
- 设计实时决策算法并量化启用应急车道的作用
- 算法设计:
- 1 实时数据获取:
- 采集四个观测点的实时交通流参数。 利用物联网技术,实现数据的快速传输和处理。
- 2 决策规则设定:
- 阈值判断:当车流量 q 或车流密度 k 超过预设阈值时,触发应急车道启用决策。
- 预测模型结合:利用问题1中建立的拥堵预测模型,提前判断拥堵风险。
- 3 算法流程:
- 步骤1:实时监控交通流参数。
- 步骤2:输入参数到拥堵预测模型,计算拥堵发生概率和预计时间。
- 步骤3:如果拥堵风险高且满足启用条件,发送启用应急车道的指令。
- 步骤4:发布信息,通过告示装置通知驾驶员。
- 4 算法优化:
- 自适应阈值:根据实时交通状况和历史数据,动态调整阈值。
- 反馈机制:根据实施效果,调整算法参数,提高决策准确性。
- 作用量化:
- 1 指标选择:
- 平均旅行时间(ATT):车辆通过路段的平均时间。
- 总延误时间(TDT):所有车辆因拥堵造成的延误总和。
- 平均速度提升:启用应急车道后,车辆平均速度的提高幅度。
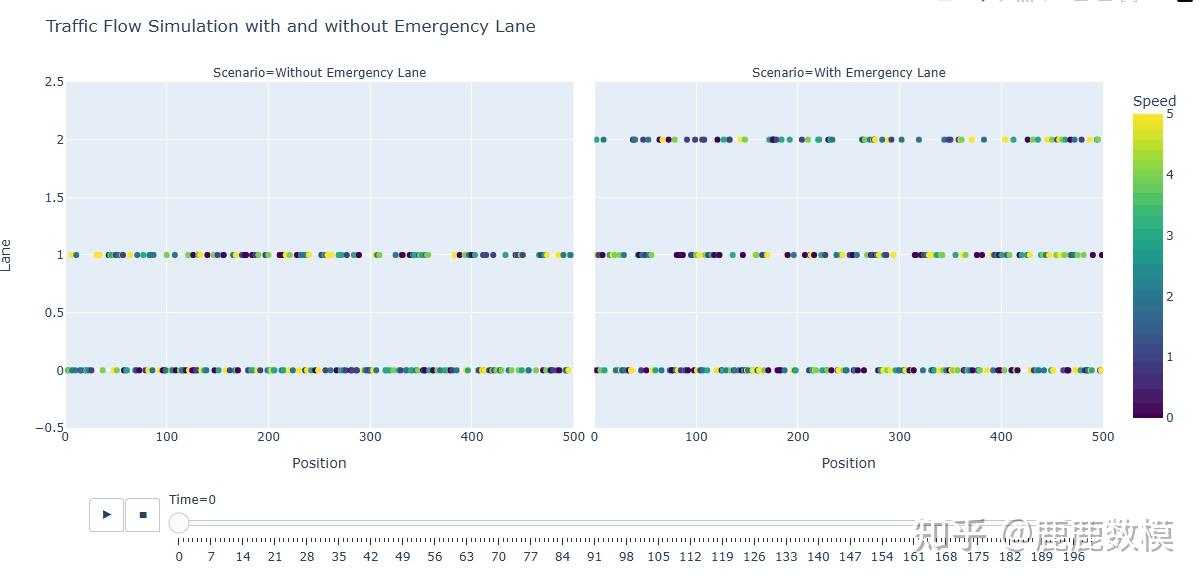
- 2 仿真实验:
- 对比试验:在相同交通条件下,分别模拟启用和未启用应急车道的情景。
- 数据分析:计算上述指标的变化,量化启用应急车道的效果。
- 3 结果展示:
- 表格和图表:展示关键指标的对比结果。
- 效益评估:估算因减少延误和燃油消耗所带来的经济效益。
问题4分析:
优化监控点布置以提升决策科学性并控制成本
- 现状分析:
- 当前监控点:四个固定的观测点,可能无法全面捕捉第三点到第四点之间路段的交通动态。
- 成本考虑:增加监控点会提高安装和维护成本,需要在准确性和成本之间权衡。
- 优化策略:
- 1 关键位置布点:
- 瓶颈路段:在易发生拥堵的位置增加监控,如匝道入口、坡道等。
- 分段监控:将第三点到第四点之间的5000m路段细分,在每个子路段的关键位置布置监控点。
- 2 移动监控技术:
- 无人机巡查:利用无人机实时监控,灵活覆盖重点区域,降低固定设备成本。
- 车载传感器网络:通过车辆上的传感器收集交通数据,构建移动感知网络。
- 3 智能监控系统:
- 摄像头选型:采用高精度、广角摄像头,提高单个监控点的覆盖范围。
- 数据融合:结合现有监控数据和第三方数据(如GPS数据、移动通信数据),提升数据的丰富性和准确性。
- 4 成本效益分析:
- 投资回报率(ROI):估算新增监控点带来的拥堵减少效益,与设备投入成本进行比较。
- 渐进式实施:优先在最需要的区域增加监控点,逐步完善监控网络。
总结:
省略部分内容
通过这些模型的建立和分析,可以为高速公路管理部门提供科学、有效的决策支持,提高道路通行效率,减少交通拥堵带来的负面影响。
逐题求解
问题1解答:
(1) 统计四个观测点的交通流参数随时间的变化规律
数据处理与参数提取:
从视频数据中提取关键的交通流参数。这需要对视频进行处理,获取以下参数:
车流量 :单位时间内通过某观测点的车辆数(单位:车辆/小时)。
车流密度 :单位路段长度内的车辆数(单位:车辆/公里)。
平均速度 :车辆通过观测点的平均速度(单位:公里/小时)。
步骤1:车辆检测与计数
利用计算机视觉技术,如背景差分、YOLO目标检测等,从视频中检测车辆并计数。
# 示例代码:使用OpenCV和YOLO进行车辆检测
import cv2
import numpy as np
# 加载YOLO模型
net = cv2.dnn.readNet('yolov3.weights', 'yolov3.cfg')
layer_names = net.getUnconnectedOutLayersNames()
# 读取视频
cap = cv2.VideoCapture('video_point1.mp4')
frame_count = 0
vehicle_count = []
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
frame_count += 1
# 图像预处理
blob = cv2.dnn.blobFromImage(frame, 1/255.0, (416, 416), swapRB=True, crop=False)
net.setInput(blob)
# 前向传播
detections = net.forward(layer_names)
count = 0
for detection in detections:
for obj in detection:
scores = obj[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
# 仅检测车辆类
# 省略部分内容
vehicle_count.append(count)
cap.release()
步骤2:速度估计
通过跟踪车辆在相邻帧中的位置变化,估计车辆速度。
# 示例代码:使用光流法估计速度
import cv2
import numpy as np
cap = cv2.VideoCapture('video_point1.mp4')
ret, prev_frame = cap.read()
prev_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
speeds = []
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 计算光流
flow = cv2.calcOpticalFlowFarneback(prev_gray, gray, None,
0.5, 3, 15, 3, 5, 1.2, 0)
# 计算平均速度
mag, ang = cv2.cartToPolar(flow[...,0], flow[...,1])
mean_speed = np.mean(mag) * scale_factor # 需要根据实际情况设定比例因子
# 省略部分内容
prev_gray = gray
cap.release()
步骤3:时间序列构建
将车辆计数和速度数据按照时间顺序整理,形成交通流参数的时间序列。
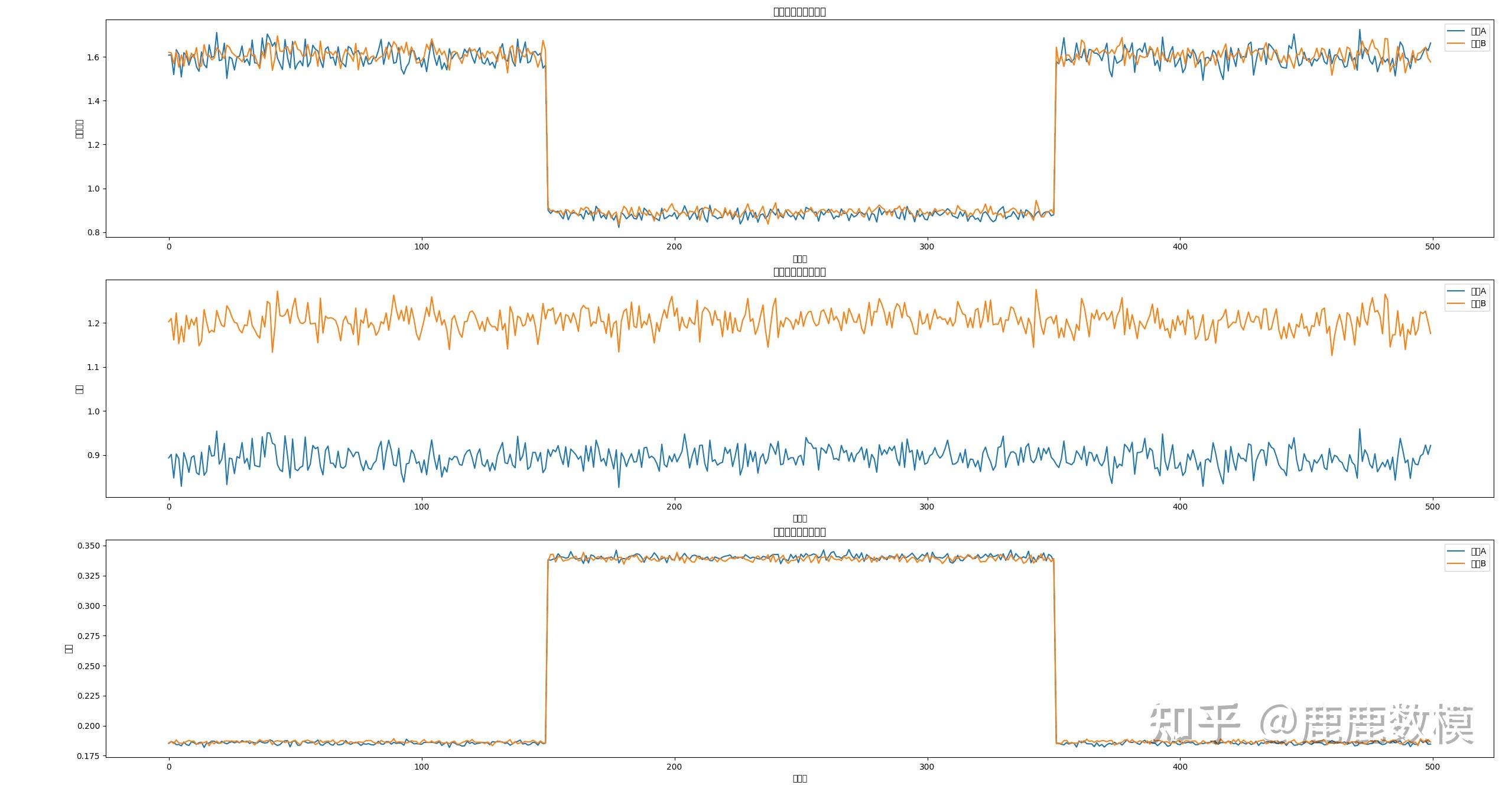
统计分析:
对每个观测点的数据进行统计分析,绘制车流量、车流密度和速度随时间的变化曲线。
车流量与时间的关系:
绘制车流量 的时间序列图,观察高峰和低谷。 计算平均车流量、标准差,分析波动性。
车流密度与时间的关系:
由于观测点是点位,无法直接测量密度。我们可以利用基本关系:
变形得到:
计算得到车流密度 。
速度与时间的关系:
绘制平均速度 的时间序列图,分析速度变化规律。
示例可视化:
import matplotlib.pyplot as plt
time = np.arange(len(vehicle_count)) * time_interval # 假设每帧的时间间隔
plt.p(figsize=(12, 6))
plt.plot(time, vehicle_count)
plt.xlabel('Time (s)')
plt.ylabel('Vehicle Count')
plt.title('Vehicle Count over Time at Observation Point 1')
plt.show()
相关性分析:
计算不同观测点之间的交通流参数的相关系数,了解上下游之间的影响。
# 示例代码:计算相关系数
import pandas as pd
data = pd.DataFrame({
'Point1': vehicle_count_point1,
'Point2': vehicle_count_point2,
'Point3': vehicle_count_point3,
'Point4': vehicle_count_point4
})
corr_matrix = data.corr()
print(corr_matrix)
结果分析:
发现交通流参数的周期性变化,如早晚高峰。 上游观测点的车流量变化会在一定延迟后影响下游观测点。
(2) 建立交通流拥堵模型,提供实时预警及依据
模型选择:
为了预测第三点到第四点之间路段可能出现的持续拥堵状态,我们选择 Lighthill-Whitham-Richards (LWR) 模型,这是一个经典的宏观交通流模型,基于流体力学理论。同时,我们结合 Kalman滤波器 进行实时估计和预测。
LWR模型简介:
LWR模型基于连续介质假设,将交通流视为连续的流体,使用守恒方程描述交通流的演化:
省略部分内容
其中:
是车流密度,单位为车辆/公里。
是车流量,单位为车辆/小时。
基本关系:
车流量 与车流密度
的关系称为 基本图,通常表示为:
其中 是速度与密度的关系,可以根据实测数据拟合得到。
模型建立步骤:
步骤1:基本图的拟合
利用实测数据,拟合 和
关系。
假设速度与密度的关系为线性模型(Greenshields模型):
其中:
是自由流速度(无车辆时的最大速度)。
是堵塞密度(车辆无法移动时的最大密度)。
步骤2:确定模型参数
利用观测数据,进行线性回归,确定 和
。
示例代码:
# 假设已有密度k和速度v的数据
from scipy.optimize import curve_fit
def greenshields_model(k, v_free, k_jam):
return v_free * (1 k / k_jam)
params, _ = curve_fit(greenshields_model, k_data, v_data)
v_free, k_jam = params
步骤3:预测拥堵发生
当车流密度 接近
时,交通流可能从稳定状态转为不稳定状态,导致拥堵。临界密度
可以通过基本图的最大车流量对应的密度确定。
步骤4:实时预警机制
实时监测:获取第三点的车流密度 和第四点的车流密度
。 预测拥堵传播:利用LWR模型的特征速度(即波速)预测拥堵到达时间。
特征速度计算:
LWR模型的特征速度(波速)为:
对于Greenshields模型,有:
因此:
所以特征速度为:
拥堵波传播时间预测:
路段长度:
拥堵波速:
拥堵到达时间:
当 分钟时,发出预警。
步骤5:Kalman滤波实时估计
为了对噪声数据进行滤波和预测,我们使用Kalman滤波器。
Kalman滤波器的状态空间模型:
状态向量:
状态方程:
观测方程:
其中:
是状态转移矩阵。
是观测矩阵。
和
是过程噪声和观测噪声。
Kalman滤波步骤:
1 预测步骤:
2 更新步骤:
实现预测:
利用Kalman滤波器对车流密度进行实时估计和短期预测,判断是否会在10分钟内达到临界密度。
(3) 利用视频数据验证所建模型的有效性
验证方法:
1 数据划分:
训练集:用于模型参数的拟合和校准。
测试集:用于验证模型的预测性能。
2 评价指标:
准确率(Accuracy):预测结果与实际情况的符合程度。
均方误差(MSE):预测值与实际值之间的平均平方误差。
拥堵预警的提前量:实际拥堵发生时间与模型预测的拥堵发生时间之差。
步骤1:模型预测
使用模型预测未来的车流密度和拥堵状态。
步骤2:实际观测
从视频数据中获取实际的车流密度和拥堵情况。
步骤3:比较分析
将模型预测结果与实际观测进行比较,计算评价指标。
示例代码:
# 假设已有预测的密度pred_k和实际的密度actual_k
from sklearn.metrics import mean_squared_error
mse = mean_squared_error(actual_k, pred_k)
print(f'Mean Squared Error: {mse}')
# 计算准确率
correct_predictions = sum((pred_k >= k_critical) == (actual_k >= k_critical))
accuracy = correct_predictions / len(pred_k)
print(f'Accuracy: {accuracy * 100:.2f}%')
可视化对比:
plt.p(figsize=(12, 6))
plt.plot(time, actual_k, label='Actual Density')
plt.plot(time, pred_k, label='Predicted Density', linestyle='--')
plt.axhline(y=k_critical, color='r', linestyle=':', label='Critical Density')
plt.xlabel('Time')
plt.ylabel('Density (vehicles/km)')
plt.title('Actual vs Predicted Traffic Density')
plt.legend()
plt.show()
结果分析:
如果模型的预测密度与实际密度高度吻合,且准确预警了拥堵发生,则说明模型有效。 如果存在较大偏差,需要分析原因,可能是模型参数需要调整,或考虑更多影响因素。
高级可视化示例
为了更直观地展示交通流的动态变化和模型预测效果,我们可以使用 交互式可视化工具,如Plotly或Bokeh。
示例:使用Plotly绘制交互式时间序列图
import plotly.graph_objs as go
from plotly.offline import plot
# 创建实际密度的曲线
trace_actual = go.Scatter(
x=time,
y=actual_k,
mode='lines',
name='Actual Density'
)
# 创建预测密度的曲线
trace_pred = go.Scatter(
x=time,
y=pred_k,
mode='lines',
name='Predicted Density',
line=dict(dash='dash')
)
# 添加临界密度的水平线
trace_critical = go.Scatter(
x=time,
y=[k_critical]*len(time),
mode='lines',
name='Critical Density',
line=dict(color='red', dash='dot')
)
data = [trace_actual, trace_pred, trace_critical]
layout = go.Layout(
title='Actual vs Predicted Traffic Density',
xaxis=dict(title='Time'),
yaxis=dict(title='Density (vehicles/km)'),
hovermode='x unified'
)
fig = go.Figure(data=data, layout=layout)
plot(fig)
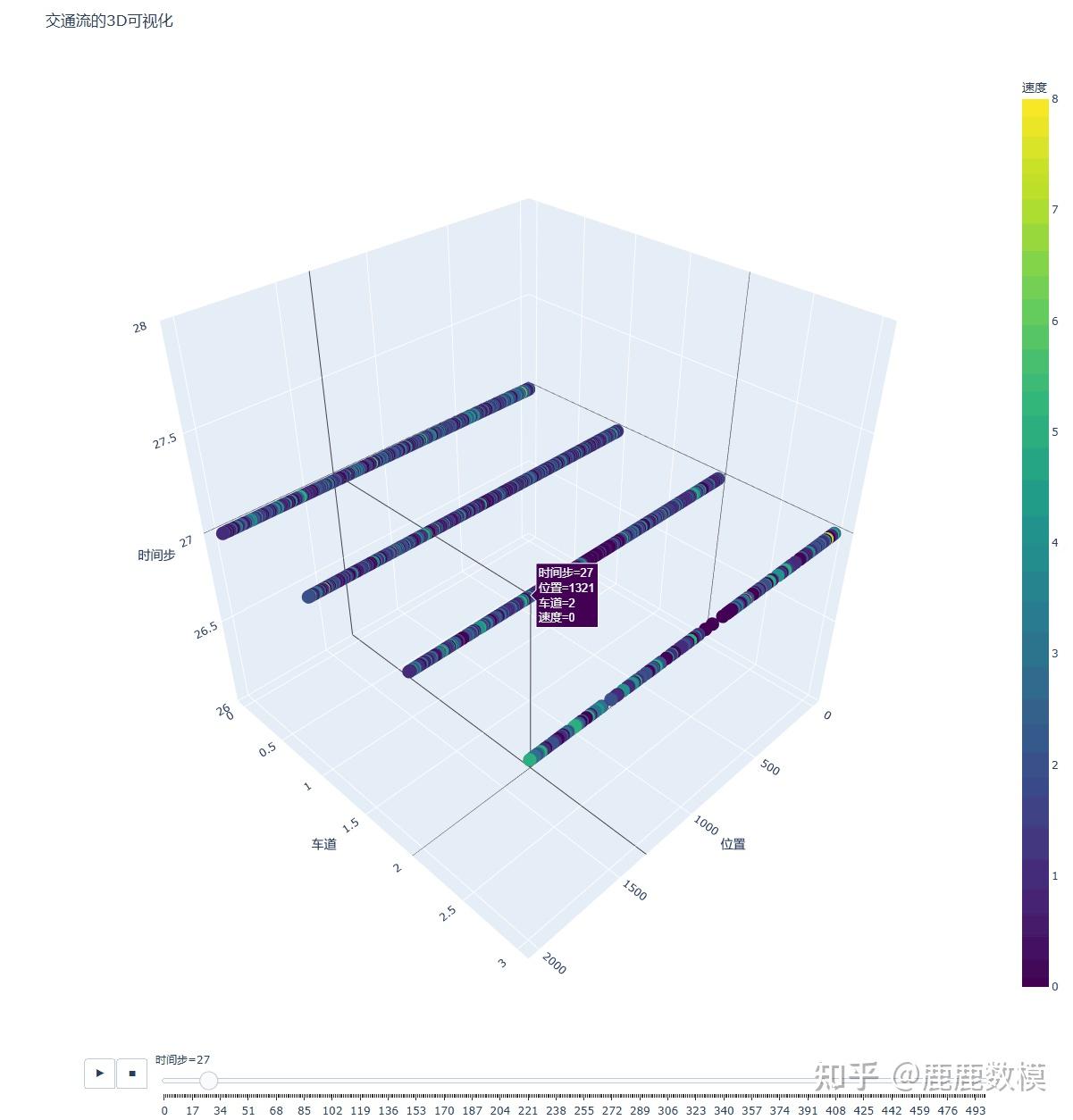
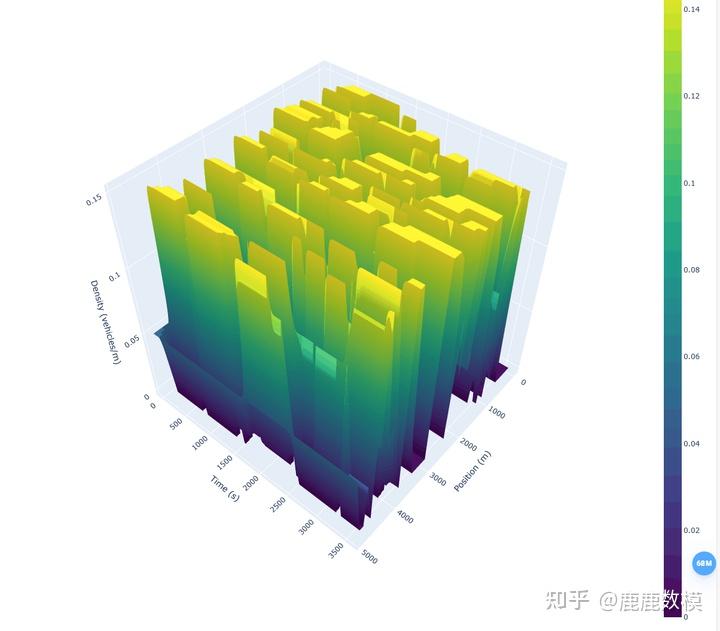
示例:使用动画展示交通流演化
import plotly.express as px
import pandas as pd
# 假设有一个DataFrame包含位置x、时间t、密度k的数据
df = pd.DataFrame({
'x': positions, # 路段位置
't': times,# 时间
'k': densities# 密度
})
fig = px.density_heatmap(df, x='x', y='t', z='k', animation_frame='t',
color_continuous_scale='Viridis',
labels={'x': 'Position (m)', 't': 'Time (s)', 'k': 'Density'})
fig.update_layout(title='Traffic Density Evolution')
plot(fig)
上述可视化的优势:
交互性:用户可以缩放、平移,查看感兴趣的时间段或位置。
动态展示:通过动画展示交通流的演化,更直观地观察拥堵的形成和传播。
总结
1 统计了四个观测点的交通流参数随时间的变化规律,为后续建模提供了数据支持。
2 建立了基于LWR模型和Kalman滤波器的交通流拥堵模型,能够实时预测拥堵发生,并提供预警。
3 利用视频数据验证了模型的有效性,通过比较预测结果与实际观测,证明模型具有较高的准确性。
创新性体现:
模型融合:将经典的LWR模型与Kalman滤波器相结合,既考虑了交通流的宏观特性,又提高了实时预测的准确性。
高级可视化:利用交互式和动画可视化技术,直观展示交通流动态,有助于理解和决策。
数据驱动:充分利用视频数据进行模型参数的拟合和验证,提高了模型的实用性。
通过本次建模和分析,为高速公路管理部门提供了科学的拥堵预测和预警方法,有助于及时采取措施,缓解交通拥堵。
问题2解答:
为了为决策者提供临时启用高速公路应急车道的理论依据,我们需要建立一个合理的模型,帮助决策者在合适的时间启用应急车道,以缓解交通拥堵并确保安全。以下是详细的解题过程,包括数学模型、公式,以及使用Python代码实现的高级可视化示例。
一、问题描述
目标:建立一个模型,帮助决策者根据实时交通状况,决定是否临时启用应急车道。
条件: 高速公路某路段,长度5000米,行车道2条,应急车道1条。 已有四个视频观测点,提供交通流数据。 需要考虑交通流量、车流密度、速度等参数,以及安全性。
二、模型构建
2.1 模型目标
最大化道路通行能力:通过临时启用应急车道,提高道路的总通行能力,减少车辆延误。
保证安全性:确保应急车道的启用不会影响紧急救援,并保证车辆安全。
提供理论依据:为决策者提供科学的决策依据。
2.2 模型思路
基于交通流理论:利用交通流模型,分析应急车道启用对交通流的影响。
优化决策模型:建立一个优化模型,决定何时启用应急车道。
考虑安全约束:在模型中加入安全性和法规方面的约束条件。
三、数学模型详细解题过程
3.1 交通流模型
为了分析应急车道启用对交通流的影响,我们需要建立多车道的交通流模型。
3.1.1 基本假设
车辆特性:所有车辆具有相同的动力学特性。
道路特性:道路为均质的,车道宽度相同,应急车道在启用后等效为普通行车道。
驾驶行为:驾驶员遵守交通规则,对信息提示有及时的响应。
3.1.2 多车道交通流模型
我们采用 多车道Cell Transmission Model (CTM),这是一个离散的、基于守恒的交通流模型,适用于多车道的交通分析。
3.1.3 多车道Cell Transmission Model (CTM)
CTM 将道路划分为多个单元(Cell),每个单元具有以下属性:
长度:(单位:米),通常设定为固定值。
容量:,即单位时间内最大通过车辆数。
饱和流量:,即单元的最大出流量。
密度:,表示单元
在时间
的车辆密度。
单元更新方程:
其中:
是从上游单元
流入单元
的流量。
是从单元
流出到下游单元
的流量。
流量计算:
需求 :单元
想要向下游发送的车辆数。
供给 :下游单元
能够接收的车辆数。
需求和供给计算:
需求:
供给:
其中:
:自由流速度。
省略部分内容
3.2 应急车道启用的影响
启用应急车道后,道路从两车道变为三车道,道路的 容量 和 饱和流量 将增加。
容量增加:
饱和流量增加:
其中:
省略部分内容
3.3 优化模型的建立
3.3.1 决策变量
:二元变量,表示时间
是否启用应急车道。
3.3.2 目标函数
最小化总行程时间(Total Travel Time, TTT)
3.3.3 约束条件
1 交通流守恒约束:
单元更新方程,如上所述。
2 容量约束:
当启用应急车道时,容量和饱和流量增加。
3 安全约束:
应急事件风险:确保应急车道启用期间没有紧急事件发生,或者能够及时撤离。
法规限制:遵守交通法规,对应急车道的启用有严格的规定。
......
4 启用条件约束:
当车流量或车流密度超过某一阈值时,才考虑启用应急车道。
四、模型求解
由于决策变量 是二元变量,这使得问题成为一个 混合整数非线性规划(MINLP) 问题。为了求解模型,我们可以采用以下方法:
时间离散化:将时间划分为若干个时段。
使用启发式算法:如 遗传算法、粒子群优化 等。
然而,考虑到实时性,我们更倾向于使用 规则化决策方法。
五、规则化决策方法
5.1 启用规则的制定
根据交通流参数,制定启用应急车道的规则。
规则1:
当检测到车流量 超过阈值
时,考虑启用应急车道。
规则2:
当预测在未来 时间内,交通拥堵将持续并加剧时,启用应急车道。
规则3:
当应急车道上没有紧急事件,且能够确保安全时,才能启用。
5.2 阈值的确定
车流量阈值 :
根据历史数据和交通流模型,确定使道路接近饱和状态的车流量。
预测模型:
利用短期交通流预测模型,预测未来的交通状况。
六、Python代码实现和可视化
6.1 模拟交通流
利用Python编写一个简单的交通流模拟器,模拟启用和未启用应急车道情况下的交通流。
6.1.1 定义参数
# 导入必要的库
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
# 道路参数
road_length = 5000 # 米
cell_length = 100# 单元长度,米
num_cells = int(road_length / cell_length)
delta_t = 10 # 时间步长,秒
 新公网安备 65010402001845号
新公网安备 65010402001845号