AEB是如何识别前方障碍物并在必要时自动刹车的?
发布时间:
2024-08-05 08:11
阅读量:
45
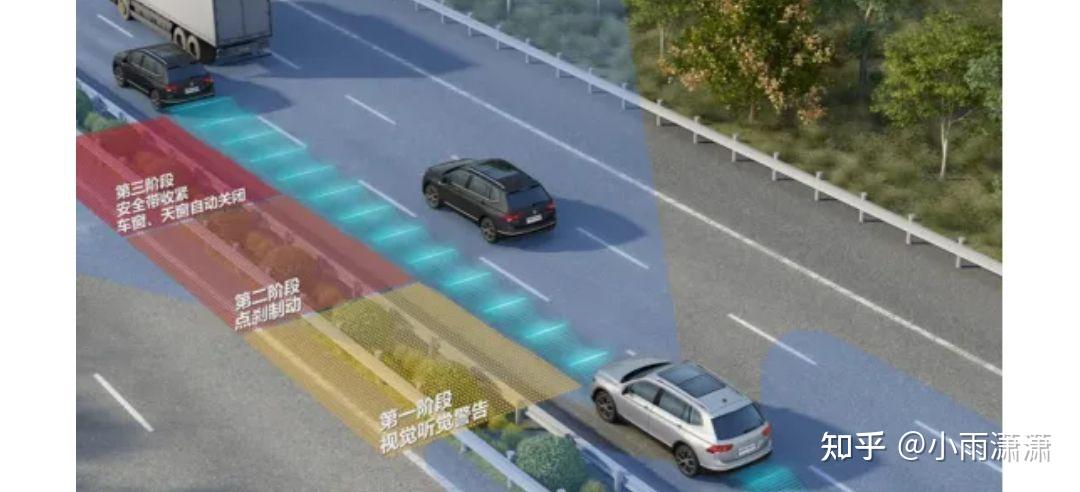
AEB是自动紧急刹车系统的简称 AEB,这是一种汽车主动安全技术,主要由3大模块构成,包括控制模块(ECU),测距模块,和制动模块。其工作原理为:车辆通过测距模块里的感知硬件(雷达、摄像头等)对周围环境进行识别,并转换为信号输出给控制端,由控制模块对制动模块发出指令,来对车辆进行制动,防止车辆产生撞击事故。
实际效果来看,AEB显示出显著的安全优势。2015年,欧洲新车评估计划(Euro NCAP)和澳大利亚NCAP联合研究发现,装备有AEB的车辆可以在现实驾驶环境中将追尾事故减少38%。这一发现强调了AEB技术在提高道路安全方面的重要作用。
它与目前的智能驾驶技术深度关联,也深度依赖智能驾驶技术的环境感知模块和控制算法,能有效降低碰撞事故的发生。
核心在于识别系统,现在的识别算法对于静止的不规则物体是很难准确判断的,比如本次主角车主手册上面就明确指出:
AEBS正常运行时应具有前向碰撞预警系统(FCW)和紧急制动功能,系统在车辆所有载荷状态下应在15km/h的车速至AEBS系统设计最高车速之间正常运行。注意的是AEBS系统设计最高车速不一定是车辆的最高设计车速。
针对外形不规则的车辆,如消防车、大货车、洒水车等,系统会识别不到或偏晚。
法规规定了车辆自动停车和避免撞击其他车辆或行人的标准,即使在夜间也是如此。根据最终规定,当与迎面而来的车辆发生碰撞的可能性迫在眉睫时,制动系统必须在90英里/时(约149公里/时)内自动启动,以防止与其他车辆相撞;当系统检测到行人时,制动系统必须在45英里/时(约72公里/时)内自动启动,即使它无法完全防止事故发生。


END
 新公网安备 65010402001845号
新公网安备 65010402001845号