为什么地球生物没有进化出轮子这类或履带结构?
很好的问题,我来详细讲讲。
想象你赶公交要迟了,你拼命往前跑,跑了一百多米就喘成狗了。这时你发现路边有几辆共享单车,你果断取了一辆骑上,轻轻一踩,速度就上去了。你一定觉得,轮子真TM是个好东西啊!
你赶上了公交,坐在座位上想,轮子这么好的东西,我身上怎么没长两个呢?上天怎么偏偏给了我两条腿。莫非是自然选择把轮子漏掉了?不,你不相信自然选择会出错。自然选择连眼睛这么复杂的结构都能进化出来,怎么可能漏掉轮子?你知道自然选择创造出了很多效率高的出奇的运动结构,比如奔跑速度能达到112km/h的猎豹,游泳速度能达到112km/h的旗鱼。但是它并没有选择轮子,难道是。。。
你可能已经猜到了一个可能,但你会怀疑:也许轮子的效率并没有你所想的那么高?事实上,自然选择也进化出了轮子,比如这种螳螂虾,有时会把自己卷起来移动。

你想,好吧,自然界中还是有轮子的。不过要是把自己卷起来在大街上滚,看起来也太蠢了,而且应该也滚不快吧。。。为什么自行车却很省力呢,到底出了什么问题?
其实你前面猜的感觉已经有点对了,轮子的效率可能高,可能不高。
想象一个完美的圆形轮子在平坦又坚固的地面上,你轻轻推了一下,它就滚了好远。你拿着这个轮子来到公园的草地上,还是轻轻推了一下,结果它没滚多远就停了(如果你想象到你的轮子倒了,那你应该想象一个更宽的轮子)。你想,哦,一定是草地太软了,带来了阻力。那我要问你,你自己在草地上走,和在平坦又坚固的地面上走,感觉区别大吗?你在草地上有明显觉得更费力吗?
你会说,那这么看来,腿对地形不那么敏感,所以大自然更喜欢腿这种设计?你可能是对的,但我不是大自然,我不知道。确实,轮子更像是针对特定环境做了优化后的设计,但谁说腿就没有被优化过呢?自然选择,是一种优化算法,所有表现优秀的设计都像是被优化过的。
我想让你继续思考的是,腿和轮子有哪些共同点,有哪些相似之处?这两者看起来区别挺大的是不是?当你走路的时候,你会先抬起一条腿,伸到前面,放下,以此为支点,重心向前移动,抬起后一条腿,跨到前面,如此反复交替。而轮子滚动时只是一直压着地面往前滚。
但我们可以这么来看,你拿一个车轮,把轮框去掉,只留下辐条,像这样。
但愿这些辐条足够结实。如果你骑着有这样轮子的自行车,那应该不会太舒服。不过。。。阿迪达斯还真有这样的自行车。

有机会不妨试试。所以,你可以把轮子想象成这种有很多条腿的设计。如果你加上更多的辐条,越来越密,最后你就会得到一个正常的实心轮子,也就不颠了。不过,我们真的不用装这么多条腿。你可能已经注意到了,对于这种没有轮框的轮子,最多也同时只有两条腿着地。如果能设计一种机构,当后一条腿离地后,迅速把它转到前面,那么两条腿就足够代替这很多条腿了。
把后一条腿换到前一条腿前面,其实没必要绕一大圈。你从一岁多就已经知道该怎么做这件事了。你不会把后一条腿甩过头顶绕到前面去,我也不认为你有那本事。
所以,为了把一条腿挪到前面,同时不蹭到地面,你可能会把腿弯一点来缩小长度,或者左右晃动改变身体的重心,像鸭子或企鹅那样走路,或者,你同时使用两者。
当你仔细想象这整个过程时,你大概会觉得,有的运动多余,浪费了能量,却又似乎不可避免。当你走路的时候,你的重心也会上下移动,也在颠。但我刚说了,你的腿可以弯。假如,当你往前移动的时候,弯曲支撑你的那条腿,让你的重心高度不变,好像就不颠了。不过你真应该试试保持自己重心高度不变走路,不自然,反而很累。
你可能还会考虑那个让你不舒服的轮子。如果你把那个奇怪车轮的辐条都换成能纵向压缩的弹簧,假如你能设计的弹性刚刚好,使得你骑的时候重心高度不变。会怎样?或许不好想象。不过我说了,如果辐条足够密,它就会变回一个正常的车轮。而你,多半是骑过一个胎压不足的正常车轮。确实,重心高度没变,车胎不断被挤压又弹回去,却有很多能量在这一过程中被浪费掉了。显然,只考虑重力势能的变化是不对滴。
那么我们现在保持自然的方式走路,是不是就是最高效的呢?差不多是,不过这取决于你的前进速度。走路的时候,支撑你身体的腿几乎不会弯曲。你宁可自己的身体上下颠,因为这样更节省能量。不过,你需要不断把后面的腿换到前面。这是必要的能量消耗。但是当你越走越快,继续用这种方式前进就吃不消了。因为你需要用更高的频率切换双腿,更大范围的加减速,更多的能量消耗。
这时,你可能会自然切换到慢跑。你的前进方式已经改变了。支撑你身体的腿开始像弹簧一样工作,落地时压缩,然后发力释放,使得你每一步可以跳出更远。这反而减少了你切换腿的频率,减少了能量消耗。
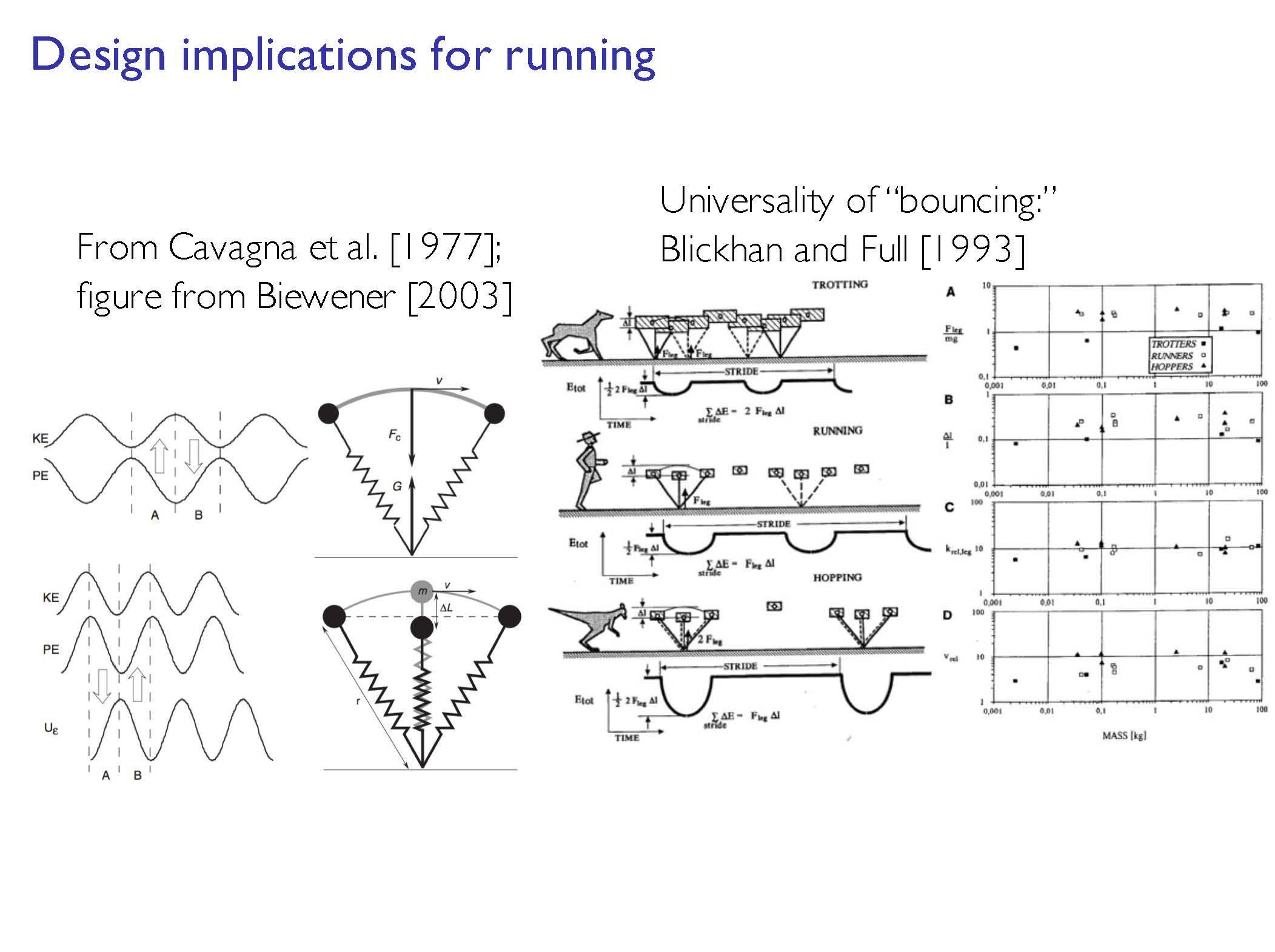
这么看来,自然选择让我们用腿移动也是一种优化的设计,是针对一定的移动速度进行优化。不过,不一定是针对唯一的速度区间。我们人是跖行动物,这意味着我们用整个脚掌着地走路。但当我们奔跑的时候,一般只用前脚掌,更接近趾行动物。这时,步态已经改变了。
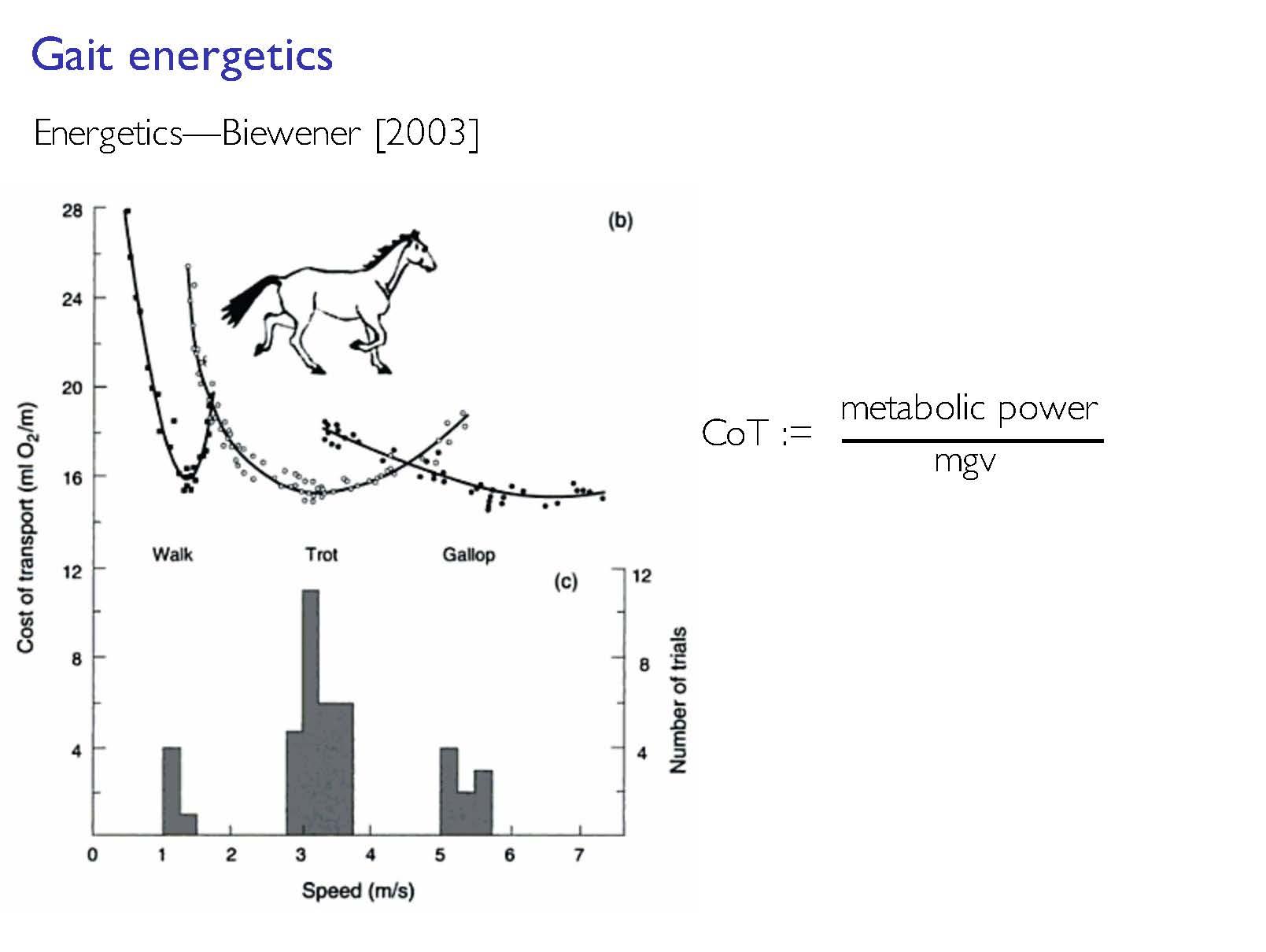
我们腿的设计针对两种速度区间进行了优化,而有的动物则更多。比如马,有三种步态。马也会选择对于当前速度最高效的一种。
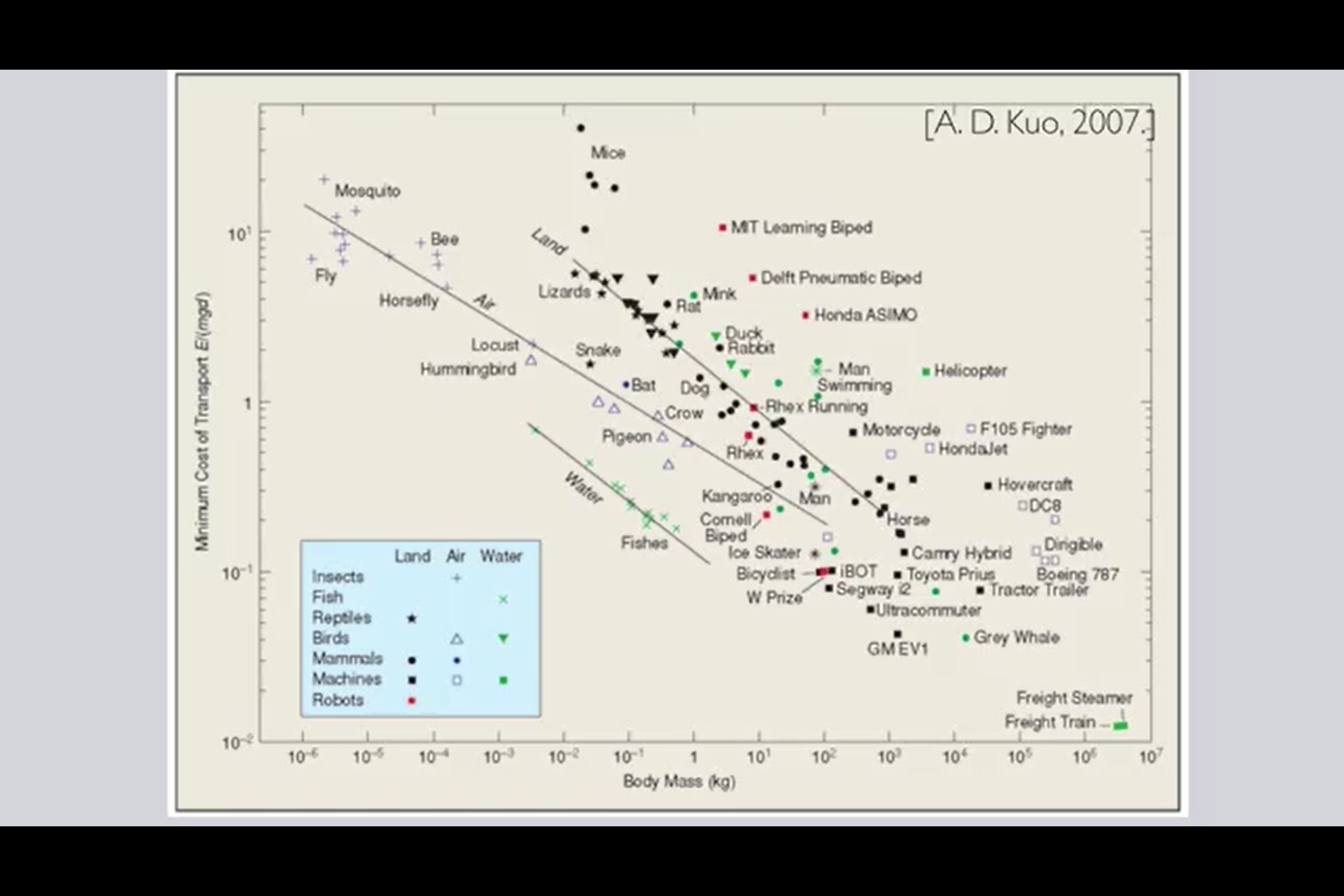
你可能想问,用腿移动真的很高效吗,甚至比轮子更高效?是的,去跑一场马拉松会消耗你大约3000大卡的热量。如果你计算一下移动单位质量单位距离所需要的能量,那么你比大多数交通工具都要高效。
事实上,人类制造了许多先进的交通工具,用了设计优秀的轮子,高精度加工的轴承。这些交通工具在空载的情况下几乎都不如动物高效。只有当负载增加时,才可能有一些优势。
最后,安利一下Coursera上宾夕法尼亚大学的机器人系列课程。其中Mobility课程主要就介绍了多足机器人,非常有启发性。虽然我现在不做这个领域的研究,但只要你有兴趣,我会毫不犹豫地把你引到这个坑里。
既然这么多赞,那就再加点东西吧。有的评论已经想到了,骑完马拉松应该比跑完更省劲。不过马拉松还是枯燥了一点,如果是越野跑甚至天空跑呢?这里可以看看K天王2小时速攀马特洪峰的逆天操作。
https://v.qq.com/x/page/n0320cnjrm2.html
当然去年阵亡的瑞士机器的操作也很骚。
https://youtu.be/VA0QopkQYjY
看完后你可能会思考更多的问题。
 新公网安备 65010402001845号
新公网安备 65010402001845号